




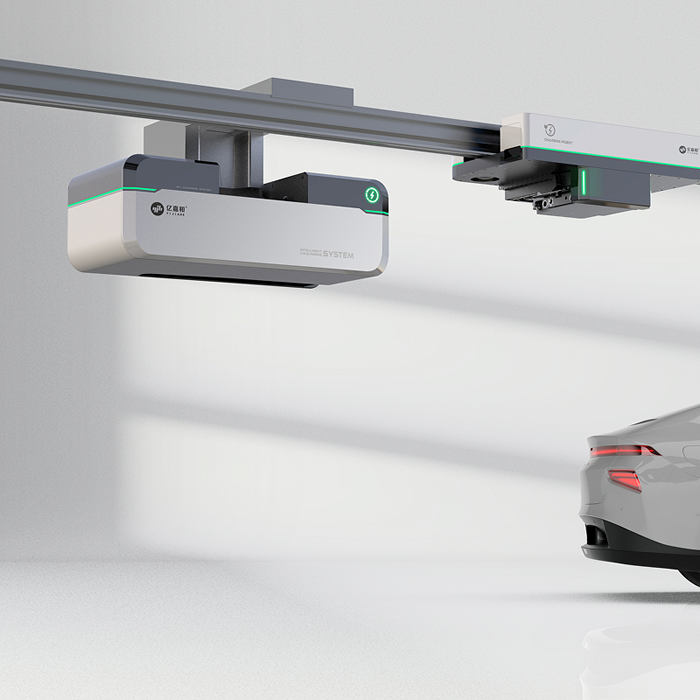

柔性觸感皮膚技術
高靈敏度觸覺識別與反饋,實現溫度、力、粗糙度等多維度感知反饋功能
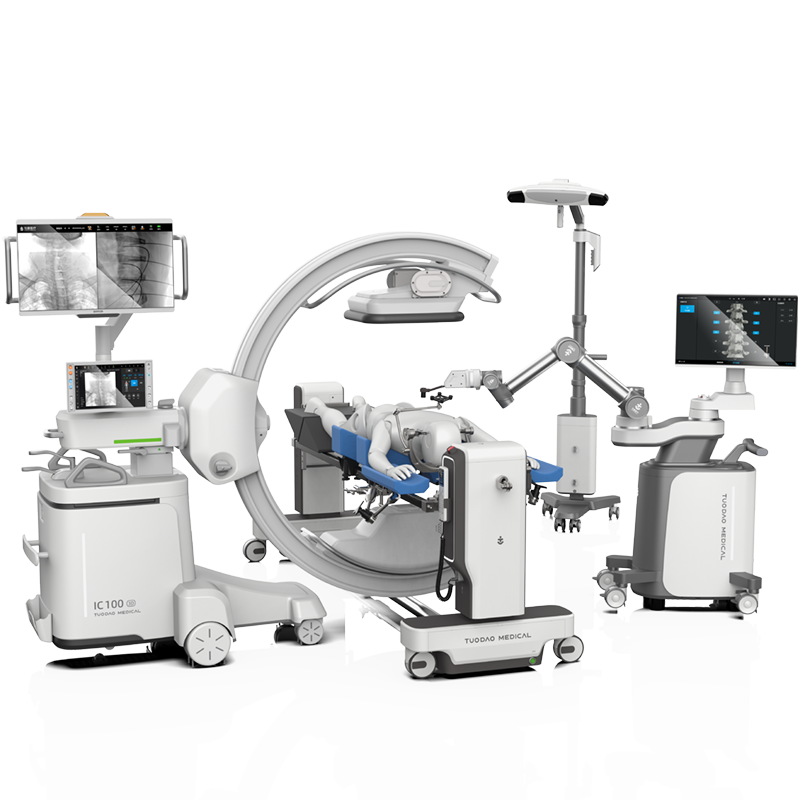
立體視覺感知技術
模仿人類雙眼,為機器人提供視覺及景深感知






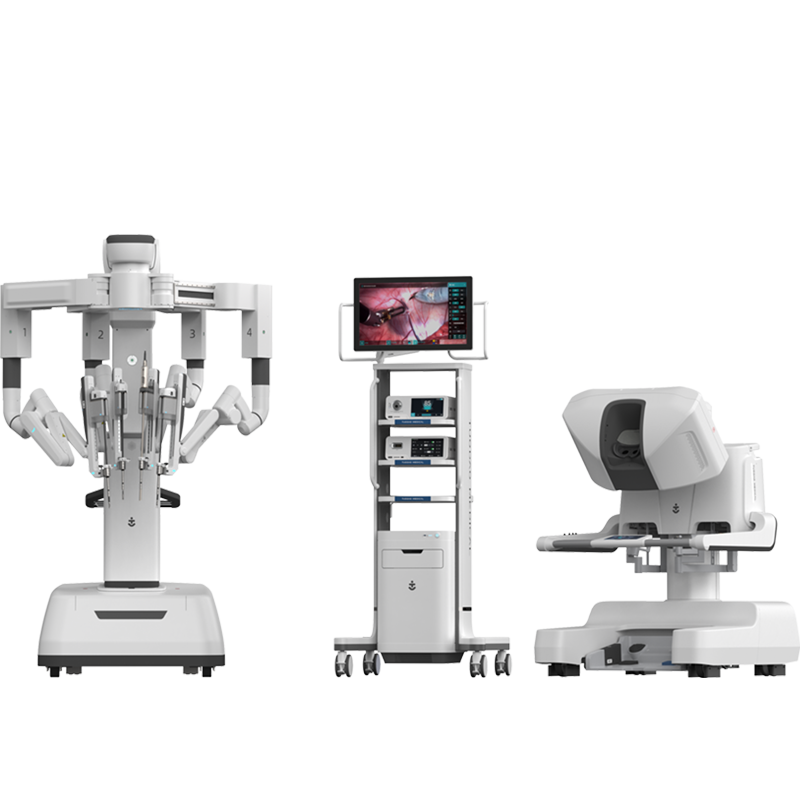
開放式軟硬件架構,高性能機器人學算法,實現更精準的控制
高靈敏度觸覺識別與反饋,實現溫度、力、粗糙度等多維度感知反饋功能
模仿人類雙眼,為機器人提供視覺及景深感知
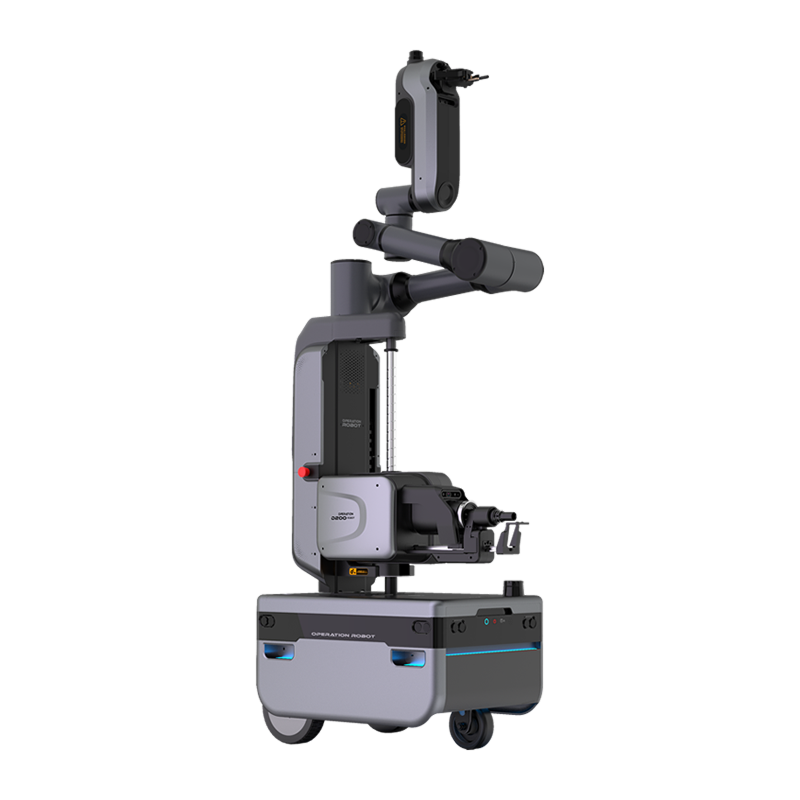
捕捉人體運動信號,實現精確控制
聯合東南大學獲批國家重點研發計劃
精確感知壓力信息,實現力交互功能
人體動作捕捉系統,實時重建人體運動和三維場景
